

स्वचालित पैनल बेंडर HMBC2202-2203
उत्पाद विशिष्टता
| नहीं। | नाम | पैरामीटर | इकाई |
| 1 | अधिकतम लंबाई | 2200 | mm |
| 2 | अधिकतम चौड़ाई | 1500 | mm |
| 3 | न्यूनतम.झुकने की लंबाई | 130 | mm |
| 4 | न्यूनतम झुकने की चौड़ाई | 240 | mm |
| 5 | अधिकतम झुकने की मोटाई (एमएस, यूटीएस410एन/मिमी²) | 2 | mm |
| 6 | न्यूनतम झुकने की मोटाई (एमएस, यूटीएस410एन/मिमी²) | 0.35 | mm |
| 7 | अधिकतम झुकने की ऊँचाई | 200 | mm |
| 8 | ऊपरी प्रेस की लंबाई समायोजन मोड | स्वचालित | |
| 9 | औसत ऊर्जा खपत | 4 | KW |
| 1 0 | आउटलुक आकार: एल*डब्ल्यू*एच | 6100*2700*2920 | mm |
उत्पाद विशिष्टता
| नहीं। | नाम | पैरामीटर | इकाई |
| 1 | अधिकतम लंबाई | 2200 | mm |
| 2 | अधिकतम चौड़ाई | 1500 | mm |
| 3 | न्यूनतम.झुकने की लंबाई | 430 | mm |
| 4 | न्यूनतम झुकने की चौड़ाई | 350 | mm |
| 5 | अधिकतम झुकने की मोटाई (स्टेनलेस स्टील, UTS660N/मिमी) | 1.8(+-90° ) | mm |
| 6 | अधिकतम झुकने की मोटाई (स्टील, UTS410N/मिमी) | 3(+-90° ) | mm |
| 8 | न्यूनतम झुकने की मोटाई (एल्यूमीनियम, UTS120N/मिमी) | 0.35 | mm |
| 9 | अधिकतम झुकने की ऊँचाई | 300 | mm |
| 10 | ऊपरी प्रेस की लंबाई समायोजन मोड | स्वचालित | |
| 11 | औसत ऊर्जा खपत | 12 | KW |
| 12 | वज़न | 32 | T |
| 13 | आउटलुक आकार: एल*डब्ल्यू*एच | 6300*5500*3300 | mm |
विशेषताएँ और मुख्य संरचना
मशीन डिजाइन और विनिर्माण के संदर्भ में, हे बेई हान झिन सीएनसी मशीनरी कं, लिमिटेड।मुख्य रूप से निम्नलिखित बिंदुओं पर ध्यान केंद्रित किया गया है:
1. व्यावहारिकता को आगे बढ़ाने और उपयोगकर्ताओं के लिए हर पैसा बचाने की बाजार अवधारणा;
2. बहुत विश्वसनीय और सटीक डिज़ाइन विचार;
3. उच्च गुणवत्ता वाले कच्चे माल, आउटसोर्स किए गए हिस्से और उत्तम प्रसंस्करण प्रौद्योगिकी;
4. उपयोग और रखरखाव की सुविधा और सुरक्षा पर अधिक जोर;
5. एक ही उद्योग में कम रखरखाव दर और रखरखाव लागत।
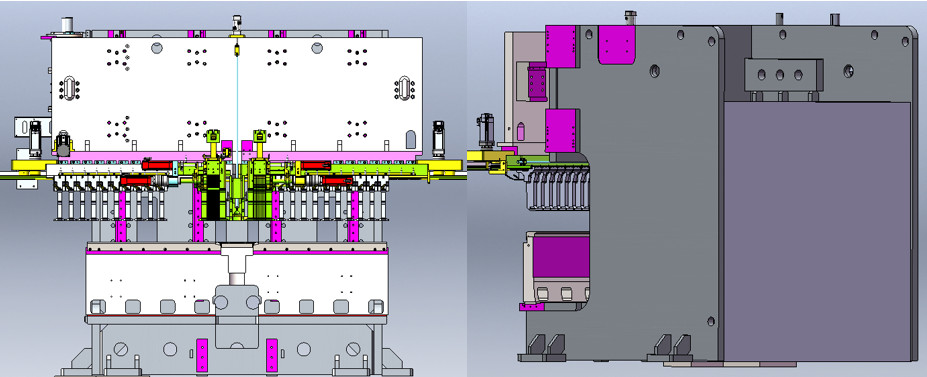
चौखटा
ए. त्रि-आयामी परिमित तत्व मॉडल स्थापित करें: विकसित और डिज़ाइन किए गए त्रि-आयामी ठोस मॉडल के अनुसार, गणना के लिए परिमित तत्व गतिशील मॉडल स्थापित करें।मॉडल बल संचरण कनेक्शन पर मुख्य घटकों पर विचार करता है।कनेक्टिंग भागों के माध्यम से बल को समर्थन तक प्रेषित किया जाता है, और फिर समर्थन की ताकत का विश्लेषण किया जाता है।
बी. स्थैतिक विश्लेषण परिणामों का विश्लेषण: धीमी प्रसंस्करण गति के कारण, शक्ति विश्लेषण को स्थैतिक समस्याओं के लिए जिम्मेदार ठहराया जा सकता है।प्लेट दबाने वाले भार और कटर सिर की ऊर्ध्वाधर दिशा में झुकने वाले भार के अनुसार, तनाव और विरूपण परिणाम नीचे दिए गए चित्र में दिखाए गए हैं।अधिकतम तनाव धड़ के गले पर दिखाई देता है, अधिकतम तनाव 21.2mpa है, अधिकतम विरूपण धड़ के ऊपरी छोर पर दिखाई देता है, और अधिकतम विरूपण 0.30 मिमी है।
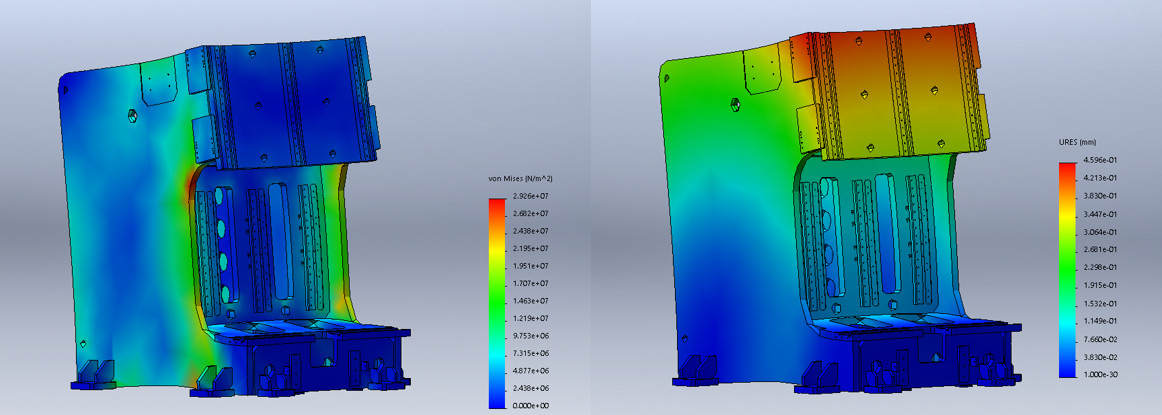
फ़्रेम के परिमित तत्व विश्लेषण के परिणामों के अनुसार, Q345 स्टील को सामग्री के रूप में चुना गया है;कार्बन डाइऑक्साइड परिरक्षित वेल्डिंग;वेल्डिंग के कारण होने वाले तनाव को खत्म करने के लिए टेम्परिंग उपचार का संचालन करें;ताकि दीर्घकालिक संचालन के लिए उपकरणों की सटीकता, स्थिरता और उच्च कठोरता सुनिश्चित की जा सके।
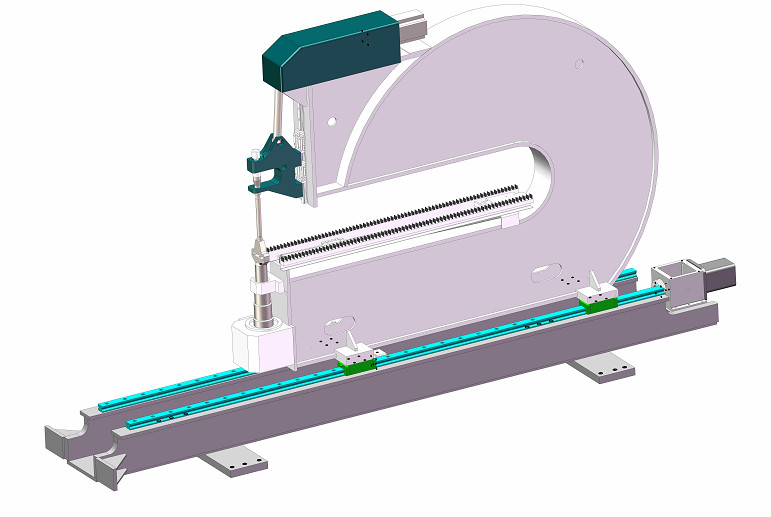
ऊपरी राम
यह भाग मुख्य रूप से रैम, हाई टॉर्क लीड स्क्रू, रेड्यूसर, गाइड रेल, सर्वो मोटर आदि से बना है। मुख्य ड्राइव को सर्वो मोटर द्वारा नियंत्रित किया जाता है, और नियंत्रण मोड सर्वो सिंक्रोनस नियंत्रण है, जो प्रभावी ढंग से स्थिति सटीकता, तेज सुनिश्चित कर सकता है गति और उच्च नियंत्रणीयता।लीड स्क्रू और गाइड रेल का स्नेहन स्वचालित स्नेहन को अपनाता है, और ग्रीस 00# है, ताकि लंबे समय तक संचालन के लिए लीड स्क्रू और गाइड रेल की सेवा जीवन और सटीकता सुनिश्चित की जा सके।
ऊपरी स्लाइडर के स्थैतिक विश्लेषण परिणामों का विश्लेषण: ऊपरी वर्कटेबल के तनाव विस्थापन नेफोग्राम से पता चलता है कि अधिकतम तनाव ऊपरी भाग के शीर्ष पर दिखाई देता है, अधिकतम तनाव 152mpa है, अधिकतम विरूपण ऊपरी भाग के ऊपरी छोर पर दिखाई देता है वर्कटेबल, और अधिकतम विरूपण 0.15 मिमी है
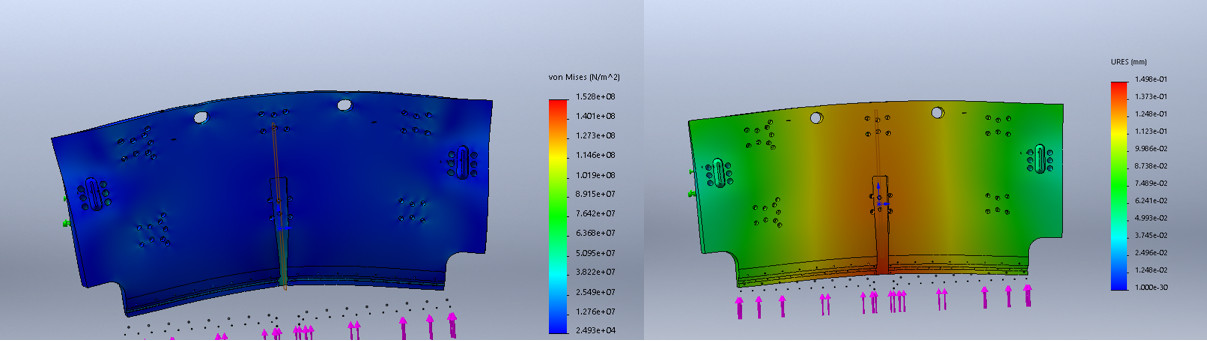
रैम के परिमित तत्व विश्लेषण के परिणामों के अनुसार, Q345 स्टील को सामग्री के रूप में चुना गया है;कार्बन डाइऑक्साइड परिरक्षित वेल्डिंग;वेल्डिंग के कारण होने वाले तनाव को खत्म करने के लिए टेम्परिंग उपचार का संचालन करें;ताकि दीर्घकालिक संचालन के लिए उपकरणों की सटीकता, स्थिरता और उच्च कठोरता सुनिश्चित की जा सके।
झुकने वाली इकाई
झुकने वाली इकाई का पावर ड्राइविंग हिस्सा हाइड्रोलिक सिस्टम की भागीदारी के बिना सर्वो मोटर द्वारा संचालित होता है, जिसके घटक पहनने और ट्रांसमिशन दक्षता को कम करने में बहुत फायदे हैं, और यह राज्य द्वारा समर्थित ऊर्जा-बचत और पर्यावरण संरक्षण नीति के अनुरूप है।
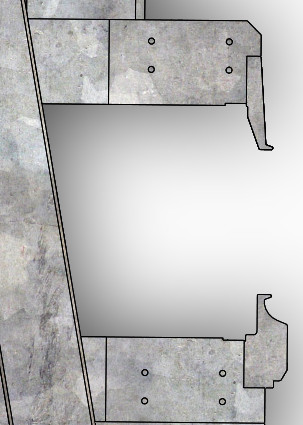
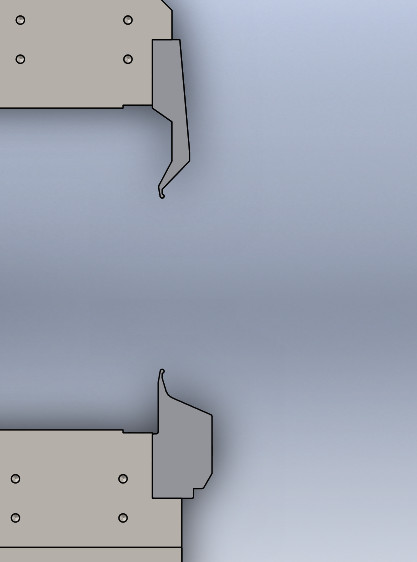
प्लेट जानकारी की सेटिंग के अनुसार, सिस्टम स्वचालित रूप से ऊपरी दबाने वाले चाकू 3 की स्थिति की गणना करता है, ऊपरी दबाने वाले चाकू 3 और निचले दबाने वाले चाकू 4 के बीच की दूरी को नियंत्रित करता है, और प्लेट को ठीक करता है;सिस्टम सेटिंग के अनुसार, चाहे यह झुकना ऊपर की ओर हो या नीचे की ओर, झुकने की स्थिति में तेजी से जाने के लिए निचले झुकने वाले चाकू 2 या ऊपरी झुकने वाले चाकू 1 को नियंत्रित करें;अलग-अलग सेटिंग कोणों के अनुसार, पेटेंट कोण गणना सूत्र झुकने को पूरा करने के लिए गणना की स्थिति में जाने के लिए झुकने वाले पंच को नियंत्रित करता है।
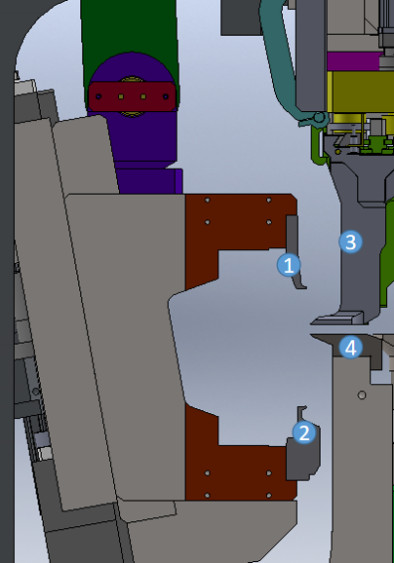
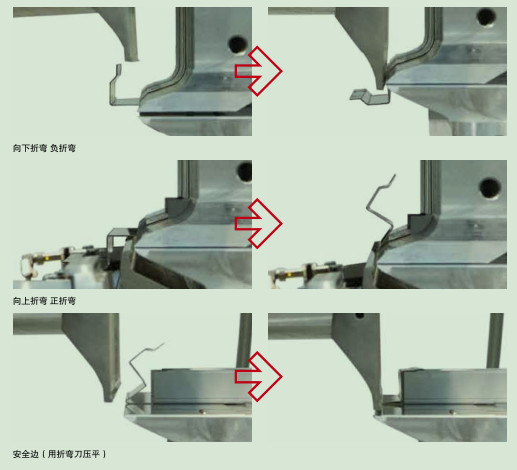
अलग-अलग झुकने की विधियों के अनुसार, इसे कोण झुकने, बड़े चाप झुकने, चपटा झुकने आदि में विभाजित किया जा सकता है, उनमें से कोण झुकने को ऊपर की ओर झुकने और नीचे की ओर झुकने में भी विभाजित किया जाता है।
ऊपरी प्रेस इकाई
ऊपरी दबाव इकाई: सभी झुकने की प्रक्रिया में उपयोग किया जाने वाला एक भाग।एचएमबीसी पूर्ण सर्वो बहुपक्षीय झुकने केंद्र एक विशेष ऊपरी प्रेस इकाई से सुसज्जित है, जिसे विभिन्न प्लेट लंबाई के अनुसार स्वचालित रूप से स्थापित और समायोजित किया जा सकता है।
औजार
झुकने वाले उपकरणों को ऊपरी झुकने वाले उपकरणों और निचले झुकने वाले उपकरणों में विभाजित किया गया है।विशेष झुकने वाले उपकरणों को ग्राहकों की विभिन्न आवश्यकताओं के अनुसार अनुकूलित किया जा सकता है।
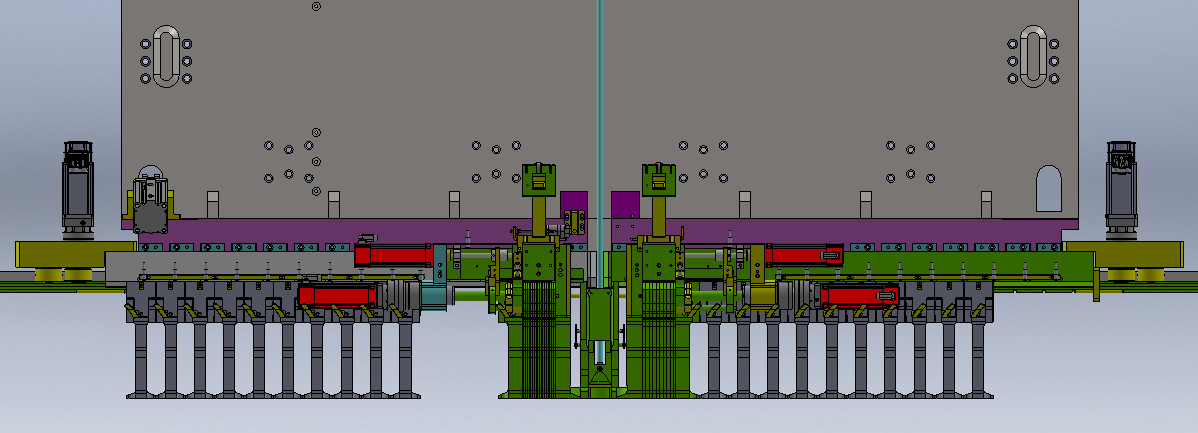
2.प्लेट फीडिंग यूनिट:
शीट मेटल की गति, क्लैंपिंग और रोटेशन को क्रमशः मैनिपुलेटर 1, क्लैंप 2 और घूर्णन डिस्क 3 द्वारा नियंत्रित किया जाता है।संपूर्ण प्रसंस्करण प्रक्रिया में शीट मेटल की फीडिंग को सर्वो मोटर द्वारा नियंत्रित किया जाता है, ताकि स्वचालन और तेजी से स्थिति का एहसास हो सके, कार्रवाई का समय कम हो सके और दक्षता में सुधार हो सके।संरचना के नवाचार और पूर्ण सर्वो नियंत्रण के अनुप्रयोग के कारण, बहुपक्षीय झुकने केंद्र की पूरी कार्य प्रक्रिया में, शीट धातु की क्लैंपिंग और रोटेशन सटीकता बनाए रख सकती है।कई जटिल वर्कपीस और यहां तक कि बहुभुज वर्कपीस के लिए, निरंतर रोटेशन सटीकता 0.001 होने की गारंटी दी जा सकती है।
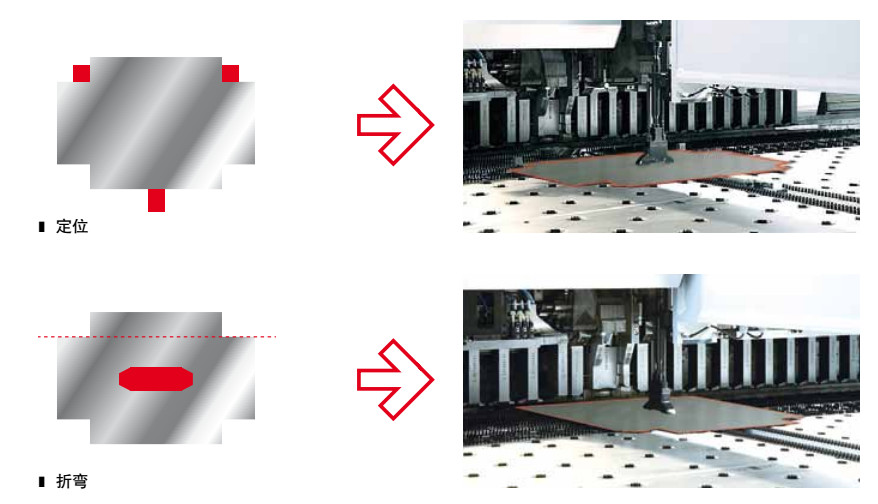
3.प्लेट पोजिशनिंग यूनिट:
प्लेट पोजिशनिंग यूनिट लेफ्ट पोजिशनिंग पिन, राइट पोजिशनिंग पिन, फ्रंट पोजिशनिंग पिन और रियर पोजिशनिंग पिन से बनी होती है;बाएँ और दाएँ पोजीशनिंग पिन प्लेट के बाएँ और दाएँ स्थिति का पता लगा सकते हैं।फ्रंट पोजिशनिंग पिन और रियर पोजिशनिंग पिन प्लेट के आगे और पीछे की स्थिति को नियंत्रित करते हैं ताकि यह सुनिश्चित हो सके कि प्लेट ऊपरी और निचले दबाने वाले चाकू के समानांतर है, जिसका उपयोग प्लेट की पोजिशनिंग सटीकता सुनिश्चित करने के लिए किया जाता है।
प्लेट पोजिशनिंग यूनिट प्लेट की स्वचालित स्थिति को पूरा कर सकती है और स्वचालित रूप से एक समय में बहुपक्षीय झुकने को पूरा कर सकती है, जो झुकने के चक्र के समय को बहुत कम कर देती है और झुकने की सटीकता सुनिश्चित करने के लिए पहले झुकने पर प्लेट की कतरनी त्रुटि को नियंत्रित करती है।
4. सीएनसी प्रणाली
उत्तर: संयुक्त रूप से विकसित सीएनसी प्रणाली और सॉफ्टवेयर को जल्दी और आसानी से लागू और प्रबंधित किया जा सकता है
बी: मुख्य विशेषताएं:
ए) ।EtherCAT बस नियंत्रण मोड को मजबूत विरोधी हस्तक्षेप क्षमता के साथ अपनाया गया है
बी) फॉर्म में प्रत्येक चरण के प्रत्यक्ष प्रोग्रामिंग और इनपुट बेंडिंग डेटा का समर्थन करें
ग) चाप झुकने का समर्थन करें
घ) पूर्ण विद्युत सर्वो नियंत्रण
ई) झुकने मुआवजा समारोह का समर्थन करें
च) द्वि-आयामी प्रोग्रामिंग फ़ंक्शन का समर्थन करें
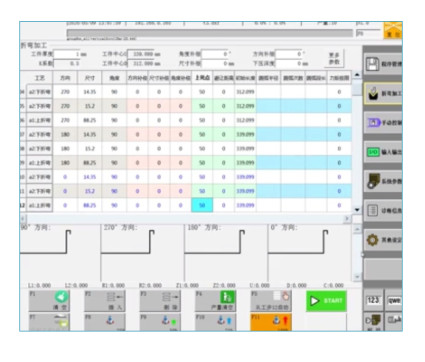
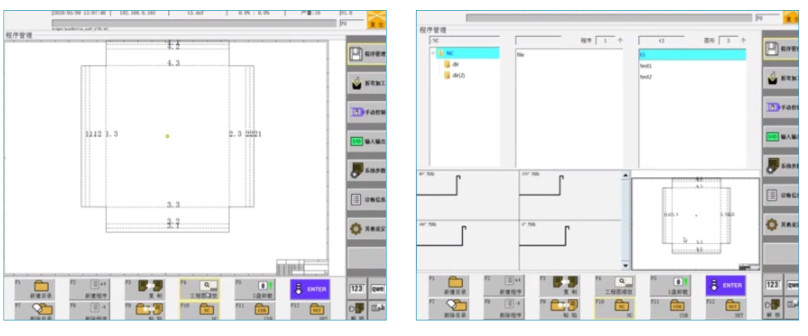
दो आयामी प्रोग्रामिंग फ़ंक्शन, दो-आयामी डीएक्सएफ ड्राइंग डेटा आयात करें, और स्वचालित रूप से झुकने की प्रक्रिया, झुकने का आकार, झुकने का कोण, रोटेशन कोण और अन्य डेटा उत्पन्न करें।पुष्टि के बाद, स्वचालित झुकने की प्रक्रिया की जा सकती है
मुख्य भाग की सूची
| नहीं। | नाम | ब्रांड |
| 1 | चौखटा | बुद्धि |
| 2 | औजार | बुद्धि |
| 3 | झुकने वाली इकाई | बुद्धि |
| 4 | सीएनसी प्रणाली | बुद्धि |
| 5 | सर्वो मोटर | बुद्धि |
| 6 | सर्वो चालक | बुद्धि |
| 7 | रेल | बुद्धि |
| 8 | गेंद पेंच | बुद्धि |
| 9 | कम करने | ताइवान |
| 10 | तोड़ने वाला | श्नाइडर |
| 11 | बटन | श्नाइडर |
| 12 | विद्युत भाग | श्नाइडर |
| 13 | केबल | यिकु |
| 14 | निकटता स्विच | ओमरोन |
| 15 | सहन करना | एसकेएफ/एनएसके/नाइच |
4) मशीन टूल का डिज़ाइन, निर्माण, निरीक्षण और स्थापना निम्नलिखित मानकों को पूरा करती है।
1、GB17120-1997
2、Q/321088JWB19-2012
3、GB14349-2011
अतिरिक्त भाग और उपकरण सूची
| नहीं। | नाम | क्यूटी. | टिप्पणी |
| 1 | टूल बॉक्स | 1 | |
| 2 | पैड स्थापित करें | 8 | |
| 3 | भीतरी षट्भुज स्पैनर | 1 सेट | |
| 4 | मैनुअल ईंधन भरने वाली बंदूक | 1 | |
| 5 | सीएनसी सिस्टम मैनुअल | 1 | |
| 6 | खुला स्पैनर | 1 |





